Thus far, we've set up most of the infrastructure of our project. We have our
BeagleBoard-xM set up with
OpenNI and the sensor drivers.
Lua is also installed on the BeagleBoard, as much of our project will be programmed using
Lua. Hopefully, our
Microsoft Kinect will arrive today, and we will be able to begin implementing skeleton tracking.
In order to allow the BeagleBoard and the
Aldebaran Nao to communicate, we will be using a
Cisco WRVS4400N V2 router that I had laying around. The BeagleBoard will be connected to the router via an ethernet cable, and the Nao will communicate with the router via wireless connection. So far, we have merely established connectivity between the Nao and the BeagleBoard, but actually sending parsable data will be more of a challenge.
The primary components of our project (so far):
 |
| Microsoft Kinect |
 |
| Cisco WRVS4400N V2 |
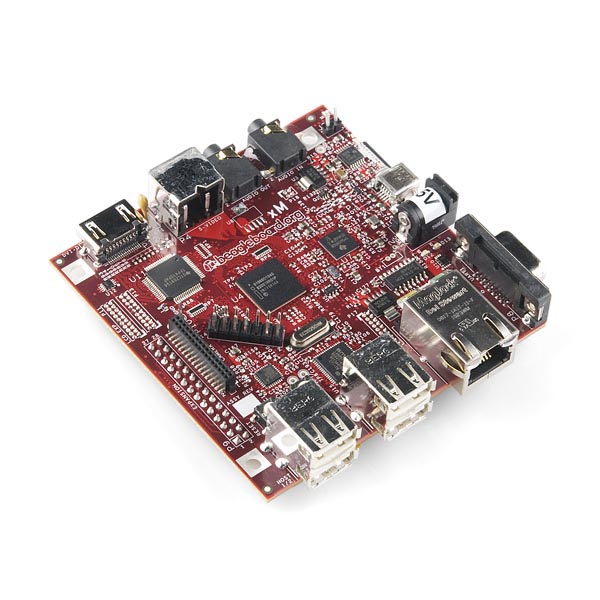 |
| BeagleBoard-xM |
No comments:
Post a Comment